Simcenter Amesim
統合システムシミュレーションソフトウェア
Simcenter Amesim 製品概要
Simcenter Amesim(シムセンターアメシム)は、システムシミュレーションソフトウェアで、機械・電気・電子・制御・熱流体などマルチフィジックスにおけるシステムモデリングと統合シミュレーション機能に加え、他のCAD・CAEソフトウェアや試験・計測・計装システムとデータの共有、連携シミュレーションなど各種ソリューションを提供する統合CAEソフトウェアです。
製品開発設計サイクル全体にわたって、燃焼や電気化学などの物理化学プロセスから、機械、電気、メカトロニクス、熱流体システムの性能評価、制御方法の考案設計、制御システムの最終調整、性能検証などリアルタイムのシミュレーション環境を提供します。
Simcenter Amesimは熱流体プロセス・自動車・飛行機など大規模システムのシミュレーションから、流体圧力調節弁、ソレノイド、モーター制御設計など単体製品開発まで、石油・ガス・エネルギー・化学プラント、重工業、生産機械、建設機械、宇宙開発、無人機・ドローン運航、オフショア・マリン設備、ロボティクス、運輸機械、冷熱工業、空調システム、廃熱回収、ヒートポンプ、蓄電、電力変換などさまざまな産業分野に利用されます。
Simcenter Amesim 製品詳細
Simcenter Amesimは、製品設計開発プロジェクトサイクル全体にわたって機械、電子、電気、制御、燃焼、電気化学、熱流体などで構成された、マルチフィジックス領域のメカトロニクスシステムの性能を仮想的に評価する、拡張性のあるシステム統合シミュレーションプラットフォームです。Simcenter Amesimには、すぐに使用できるマルチフィジックスライブラリと、強力なプラットフォーム機能によってサポートされるアプリケーション、および、機械・電気・熱流体とその制御システムなど複合領域に合わせた各種業界向けのソューションが組み合わされています。
豊富なマルチフィジクスライブラリとコンポーネント
ライブラリには、すぐに利用できる6500以上のアプリケーション指向型の機械・電気・熱流体・制御システムのコンポーネント、および、そのサブモデルが用意されています。コンポーネントは、システムの油圧、空気圧、熱、電気、または機械的な動作を表す非線形時間依存の解析方程式を使用して、C言語やPython、またはModelica言語で記述されます。コンポーネントはその方程式のパラメータを定数または変数として、更に多数のサブモデルに分化されます。ユーザ独自サブモデルの開発や秘密保守セキュリティ対応のスーバーコンポーネント構築にも対応します。
Simcenter Amesimは、Statechart環境をサポートし、システムの状態遷移ロジック、状態スケジューラ設定、状態変数の離散制御などに利用できます。
解析モデルは、コンポーネントのアイコンとStatechart図で構成され、スケッチ図として表現します。コンポーネントのアイコンは電気、油圧、空圧、制御、機械電気システムなどの回路図記号、機器図記号(ISO、IEC)など各工業規格に準拠します。馴染んだ感じで、楽々解析モデルのスケッチ図を作成することができます。また、解析モデルには、複数の作動流体、気液二相流など複雑な複合流動ルートに対しても、同時に統合解析することができます。
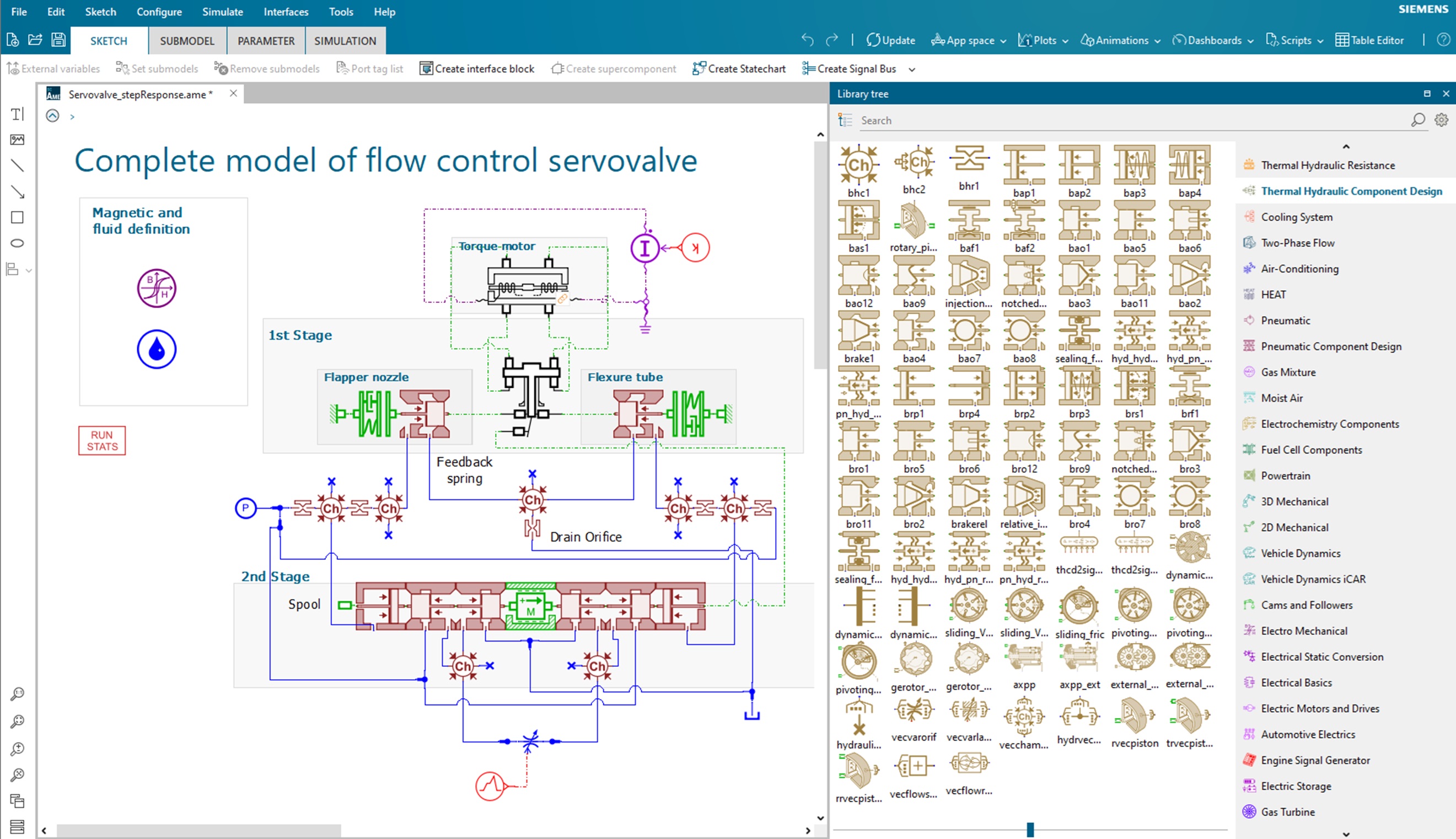
図1. 熱流体コンポーネントを用いた流量制御サーボ弁の開発モデル
製品開発設計エンジニアは、コンポーネントおよびサブモデル、またはStatechart図を利用して、すぐに解析モデルを作成して,メカトロニクスシステム性能およびパフォーマンスを仮想で評価して、最適化を実施することができます。開発の初期段階から最終的な性能検証や制御の校正にいたるすべてのシナリオにおいて、試行解析やパラメータ スダティ解析、最適化解析を実行することができます。図1には、フランスMoog社の二段型流量制御サーボ弁の製品開発モデル構成スケッチ図とSimcenter Amesimの熱流体コンポーネント設計ライブラリの使用例を示します。
Simcenter Amesimは、Modelicaの物理コンポーネントを直接利用することができます。また、オプションでModelicaプラントフォーム、Modelica Editorグラフィカルユーザインタフェイス(GUI)環境を提供します。これにより、Modelica言語によるコンポーネント作成、コード開発、サブモデル作成、Modelicaソルバーとの統合シミュレーションなどに利用できます。
他のソフトウェアとの連携シミュレーション
Simcenter Amesimは他の商用ソフトウェアと連携シミュレーションするインタフェイス規格FMI(Function Model Interface)、およびプラントモデルと制御モデルを連携するMiL(Model-in-the-Loop)、プラントモデルとコンパイル済の制御コードを連携するSiL(Software-in-the-Loop)、プラントモデルと実物コントローラを組合わせるHiL(Hardware-in-the-Loop)、制御モデルと制御対象実機を組合わせるRCP (Rapid Control Prototyping)などのリアルタイム連携シミュレーション環境をサポートしています。Simcenter Star CCM+など他のCAEソリューションやSimcenter Teamcenter(R)との連携はもちろんのこと、その他の商用CAE/CAD/計測/計装/PLC/制御系の実体プラント、およびSimulink(R)と連携することもできるクロースプラットフォームの柔軟性により、多様なエンタープライズプロセスとの統合は容易になります。
プラットフォーム環境・機能
Simcenter Amesimプラットフォーム独自の機能により、複雑なマルチ領域システムの設計や、コンポーネントの作成、解析を容易に行うことができます。
Simcenter Amesimプラットフォームには、使いやすさとスケーラビリティを高める独自の特長が備わっています。
これには、以下のような種々の関連機能および利用環境が含まれます:
- グラフィカルユーザインタフェイス環境
- ライブラリに複合領域における6500以上の物理コンポーネント群とそのサブモデル
- ユーザ独自のコンポーネント開発設計機能
- コンポーネントおよびサブモデルのカスタマイズ環境
- 流体コンポーネントを熱流体コンポーネントへの変換ツール
- ユーザ独自のセキュリティ保護付きスーパーコンポーネント作成機能
- 外部計測・制御・解析データのインポート機能
- 外部からインポートした時刻歴データの編集(テーブルエディタ)
- MiL/SiL/HiL/RCP/Real-Timeなど外部リアルタイム提携機能
- FMIによる外部ソフトウェアデータのインポート/エクスポート機能
- 外部ソフトウェアとの同期シミュレーション(Co-Sim)機能
- 紙ベースのグラフ図のデジタライザー
- 3次元CADデータインポート機能
- 3次元CADデータ編集機能
- 1D/3D CAE:外部3次元有限要素構造解析ソフトウェア(Nastran、Ansysなど)FEMモデルの剛性データと固有値解析結果のインポート機能
- コンポーネントのロジック制御、状態チャート(Statechart subset)環境
- Microsoft Office Excelアドイン
- 構造・流体および制御システムの動的特性の線形化
- 構造・流体および制御システムの状態変数による固有値解析、伝達関数解析
- 高速フーリエ変換による回転機械のスペクトルマップ、パワースペクトル密度関数解析
- パラメータスタディ、試験計画法、最適化設計解析環境
- パラメータスタディおよび最適化解析による、変数のアクティビティおよび寄与度評価
- コンポーネントのエネルギー消耗、パワーフロー評価、パワーエネルギー最適化
- 制御システムの階数削減モデリング(ROM)作成機能
- 階数削減モデリング(ROM)のエクスポート
- 機械学習・人工知能(AI)モデルのONNXインタフェイス機能(ONNXtoAme、ONNXtoFUI)
- ニューラルネットワーク制御モデル作成機能
- 制御モデルの自動作成ツール
- 車両運転スケジュール管理ツール
- 運航、運転ルートGPXデータのインポート機能
- 軌道設計制御ツール
- 燃焼システム設計ツール
- テーブルデータから燃焼室形状作成ツール
- 燃焼噴気推力計算ツール
- 燃焼の解析結果による燃焼マップ作成ツール
- コンプレッサー設計ツール
- ガスタービンパフォーマンス評価ツール
- ポンプ設計ツール
- 熱交換器設計ツール
- 有機ランキンサイクル、熱力学解析ツール
- 電動機械のノイズ&振動評価ツール
- ギア連接モデル作成ツール
- トランスミッション作成ツール
- 16自由度車体モデル作成ツール
- C++、Fortran、VBA言語によるコンポーネント開発設計環境
- C++、Fortran、VBA言語によるモデルのスクリプト作成環境
- Python言語によるシミュレーション スクリプト作成
- 解析並列計算、パッチラン環境
- 解析のエクスペリメント管理、解析パフォーマンス評価
- シミュレーション結果の各種ニーズに対応するプロート表示機能
- 変数、パラメータス タディ解析に対するポスト処理
- ダッシュ ボードによる2D視覚化アニメのプリ・ポスト機能
- 3Dアニメ ポスト処理機能
- スケッチ図によるシミュレーション結果アニメ表示
- Modelicaエディタ、Modelicaプラットフォーム環境
- インタラクティブヘルプ
- 数多くの製品開発ツール、コンポーネント設計ツール
- プラットフォーム、ソリューション、ライブラリのコンポーネント群に関する1200以上の例題
解析ソリューション
Simcenter Amesimは電気、機械、熱流体など多業界の複合領域において、システムの統合シミュレーション機能がそろっています。
電気システムのシミュレーション
電動パワートレイン、メカトロニクス、制御システムおよび電気機械システムに関し、構想設計から、動的パフォーマンスの最適化、消耗電力評価、制御方法の考案、制御検証まで統合的にシミュレーションを行うことができます。
エレクトロニクス、蓄電システム、バッテリーパック、バッテリーセル、バッテリ電気化学、コンデンサ、電力変換、電気モータードライブ、発電機、電磁場・電磁回路の渦電流モデリング、熱電エネルギー変換、モーター制御、アクチュエータ、センサー、シグナル、フィルタ、PID/PWM制御器、ニューラルネットワーク制御、伝達関数、ONNX機械学習など、すぐに使用可能な数多くのコンポーネントを使用して、あらゆる電気機器のアーキテクチャを構築できます。
拡張性が高く柔軟なマルチフィジックス、マルチレベルアプローチを使用して、電機車両、航空宇宙、船舶機械、重機、産業機械、マリン設備など幅広い産業分野において、電気、電気機械、油圧システム、制御システムの設計、現実的な機械負荷または油圧負荷でのシステム性能や効率の評価、制御の設計および検証など、以下に示す多領域におけるさまざまな技術問題を解決することができます。
環境制御システムのシミュレーション
- 構造・電気システムの熱管理
- 操作室環境・空調システムのシミュレーション
- エアサイクルマシン
蓄電・発電シミュレーション
- 燃料・電力消費評価
- バッテリセルの電気化学シミュレーション
- バッテリ寿命最適化、充電・放電管理、パフォーマンス評価
- 燃料電池、蓄電システムのパフォーマンス評価
- ソーラー光・熱発電システムのシミュレーション
- 風力発電システムのシミュレーション
- 電力変換システムのシミュレーション
電磁エネルギーのシミュレーション
- 電気モーター・発電機・パワートレイン
- 電磁弁
- 磁気アクチュエータ
- 磁石、磁気ブリッジ
機械システムのシミュレーション
機械システムに対し、変動質量、変動剛体又は弾性体の剛性、減衰、機構運動、及びサーボバルブ、アクチュエータなどの油圧系運動、接触、摩擦、モーターなど電気機械との連成を考えたダイナミクス特性を評価する1Dから3Dまでの機械コンポーネントを利用して、統合的な解析を実施します。また、外部有限要素モデル(2Dおよび3D)および解析結果(NastranやANSYS)をインポートして、線形化した剛性、質量の解析結果の固有振動数、周波数応答関数などを考えることもできます。線形解析から非線形解析まで対応でき、機械的構造と電気または油圧運動との間の連成を正確にシミュレーションできます。
機械システムのモデリング
1Dから3Dまでの機械コンポーネントを使用して、マルチボディダイナミックス(MBD)分野のテクノロジーにより、システムのキネマティクスやダイナミクス挙動を正確にモデリングし、シミュレーションできます。すぐに使用できる剛体または弾性体ジャンクションの連接機能を使用して、弾性衝突、乾性または粘性摩擦、ウォームギア、スクリューナット、ラックアンドピニオン、ロープ、シーブなどさまざまな機構運動を迅速に解析できます。また、カムとフォロワーの検証済みモデルは、さまざまな油圧機械式バルブトレインアーキテクチャの性能をシームレスに比較するのに役立ちます。
機械システムの統合解析
- 飛行機の運航ダイナミックスと制御システムのシミュレーション
- ロボット走行、マニピュレータ、関節運動の制御設計・効果評価
- 車両運動ダイナミックス解析
- 飛行力学シミュレーション
- 地上無人コントローラのシミュレーション
- 飛行パフォーマンス評価
- エアクラフト浮楊・オリエンテーションのシミュレーション
- 油圧サーボアクチュエータのシミュレーション
- 電気・油圧サーボアクチュエータ飛行制御シミュレーション
- 電気・機械ハイブリッドアクチュエータ制御シミュレーション
トランスミッション解析
設計の初期段階から、あらゆるタイプのトランスミッションと車両の統合を最適化して、燃費、運転のしやすさ、乗り心地、信頼性のバランスを取ります。Simcenter Amesimは、損失を予測することで燃費を改善します。寄与度が高い固有振動モードを検出し、修正して、振動を抑えます。また、接触力の変動、クラッチ振動、こもり音、クランク騒音を削減して、振動を抑制します。
運輸機器の動的特性シミュレーション
自動車シャーシ自体から、シザースリフト関連コンポーネントまで、設計の初期段階から検証段階まで、製品開発のサイクルにおいて、車両システムを効果的にモデル化します。快適性、安定性、ハンドリング、アジリティ、運転のしやすさなど相反する性能特性のバランスを調整します。
フライト制御システムのシミュレーション
ドローンや飛行機のフライト制御、無人機制御システム全体のマルチフィジックスの側面に対応し、機械、電気機械、電気静油圧、サーボ制御アクチュエータなど様々な制御技術を実現します。Simcenter Amesimは、事前設計から詳細な動的解析、飛行エンベロープ全体を考慮したリアルタイム検証に至る開発プロセス全体をカバーします。設計の初期段階に、独立したシステムと飛行制御を統合して、その相互作用を評価することも可能です。
ドローンや飛行機の着陸システムのシミュレーション
ドローンや飛行機が地上走行するときの燃料消費量と炭素排出量を削減することにより、環境に優しく費用効率の高い着陸装置システムを設計します。Simcenter Amesimを使用して開発の初期段階から詳細な解析、システム統合および検証を行うことで、厳しい着陸条件の下での着陸装置システムの信頼性を改善できます。離陸が拒否されるケースに対応するように、ブレーキシステムの堅牢性を高めるなどして、リトラクション、伸張システムの構造を正しく統合することができます。
ロボット制御や自動運転システムのシミュレーション
ロボットや自動運転について、自動車速度・軌道制御から関節運動、6自由度平行ロボット運動プラットフォーム、テオ・ヤンセンの2足歩行機構、適応可能なグリッパー手指まで、数多くのコンポーネントやサンプルモデルを揃えています。特に、4足走行ロボットについて、変動シグナルから歩容調整、変速歩行など様々な制御システムをシミュレーションすることができます。
流体システムのシミュレーション
Simcenter Amesimでは、さまざまな種類のコンポーネント、フィーチャ、アプリケーション指向のツールを選択できるので、油圧作動システム、パワートレイン、バルブトレイン、燃料供給、環境制御システムといった様々な流体システムをモデル化できます。
航空機やドローンをはじめ、自動車、運輸車両、マリン機械、土木機械、クレーン、クローラー、農機、鉱山機械、ロボティクスなどの油圧・空圧、燃料システム、排気ガス、ブレーキ、潤滑系、冷却系の作動流体に対し、物理試作回数を最小限にとどめて、ポンプ、コンプレッサー、バルブ、サーボ制御など流路システムをモデリングして、システム全体の圧力、流量変化を調査し、コンポーネントのダイナミックス挙動を最適化します。
また、コンプレッサーやポンプなどの3次元CADデータをインポートして、ジオメトリ詳細情報を評価し、忠実度の高いモデルを簡単に作成できます。これにより、流れの特性、圧力リップルの低減、ポンプ容量の正確な調整など、高性能が求められるニーズに対応します。
他に、サーボ制御バルブ、エンジン排気システム、燃料噴射ガム設計、熱交換パフォーマンスの最適化、および、熱交換器内部流路の詳細設計など単体製品の設計開発にも利用できます。
熱システムのシミュレーション
熱システムのシミュレーションでは、流体システムのシミュレーションに、熱・エネルギー変換・気液二相流ソリューションを加えて、圧縮性流れ、ガス・蒸気混合、エアレーション、キャビテーションを評価する熱力学的なソリューションを実施します。また、モイストガス解析、空調システムの熱効果評価や、水素液化・気化プロセス、水素充填システム、複数流体の流動などをシミュレーションできます。
Simcenter Amesimは、流体コンポーネントを熱流体サブモデルに変換するツールがあり、既存流路ネットワークに対し、熱流体解析をスムーズに実施することができます。
空調快適性シミュレーション
空調ループ、または、ヒートポンプの設計を調査して、冷暖房プロセスを評価し、最適化します。また、外気条件や技術的な意思決定が室内温度と湿度に及ぼす影響を確認し、快適な居室条件を評価します。
Simcenter Amesimは、多数作動流体、気液二相流など同時に流れるシステムのシミュレーションが可能で、熱交換器、空調システムや、ヒートポンプにおいて、冷媒の気液二相流、冷却作動流体、モイスト空気、流動システム全体の統合解析をすることができます。
電気車両の熱管理システムのシミュレーション
航続距離や車室の快適性を最適化するほか、バッテリや電気モーターなどの重要なサブシステムの温度も制御できます。また、Simcenter STAR-CCM+の数値流体力学 (CFD) テクノロジーと緊密に統合しているため、熱音響解析、高度な熱交換器スタック解析も活用できます。
環境制御システムのシミュレーション
シミュレーションによって、航空機、船、潜水艦、列車などの操作室や居住環境の快適さを確保できます。キャビン、換気システム制御、全体的なエネルギー管理、空調、換気回路、および炭酸ガスボンベ噴射システムの設計が可能で、動的条件下で温度、湿度、圧力、圧力変化率を考慮できます。重量・体積を低減しつつ、かつ、エネルギー消費が大幅に削減された高効率システムを設計することができます。
熱力学システムのシミュレーション
固体、液体、ガス間の熱伝達や気液間の相変化現象をシミュレーションし、あらゆるタイプの熱管理システムをモデル化することが可能です。ポンプ、サーモスタット、熱交換器などの包括的なコンポーネント群を活用して、システムの過渡挙動を正しく探求します。コンポーネントのサイズの設計、複数コンポーネント間の熱の相互作用を考慮しながら、様々なアーキテクチャや制御戦略を比較することができます。
車両およびエンジンの熱管理システムのシミュレーション
熱交換器、ポンプ、サーモスタットを最適化して、エンジンが正しく冷却されるようにしつつ、最大の熱安全性と高いエネルギー効率を実現できます。単純で、かつ、使いやすいシミュレーション環境を利用して、暖機フェーズ、制御戦略、HVACシステムを最適に統合します。相変化材料や熱回収システムなど逆効果が混在する条件でも、高度な技術評価が可能です。
パワーエネルギープラントプロセスのシミュレーション
数多くのコンポーネントを利用することで、パワーエネルギープラントプロセスのマルチフィジックス領域においてもシミュレーションが可能です。ジュールガス効果のシミュレーションから、水素ガス液化・気化プロセス、高圧ポンプ、蒸気サイクル、有機ランキンサイクル、水素ステーション設計、水素配送システム評価、ソーラー発電、風力発電、熱力発電のパワー資材、エネルギー資源開発、プラント効率化など、様々な物理プロセスに関する機能が備わっています。
解析事例
調圧弁の動作シミュレーション
下流圧力を制御する調圧弁の動作原理を図2.aに示します。下流圧力が低下すると、パイロット弁の弁体が下に移動し、流路を開放します。それによって、パイロット弁上方のキャビ圧力がリリースされ、メインバルブが開放され、下流圧力を上昇させ、同時に、パイロット弁を閉じさせます。下流圧力が上昇すると、逆の動作が起きます。
圧力調整弁モデルは図2.bに示すように作成されます。流路ネットワークはオリフィス板と配管の流体コンポーネント(青)を用いてモデル化し、直径、長さ、表面粗さを設定します。弁体質量は1D機械コンポーネント(緑)を用いてモデル化し、質量、摩擦係数、最大移動量(開度)を設定します。弁内流路は、流体設計コンポーネント(茶)を用いてモデル化し、ピストンや、ノズル、ロードの直径、デッドボリューム、ばね定数、閉じる時のばねの力を設定します。あとは、初期流動条件について、本事例では、ソース圧:7.0bar、排出圧力:0.barを設定するのみでモデルの作成が完了します。
-
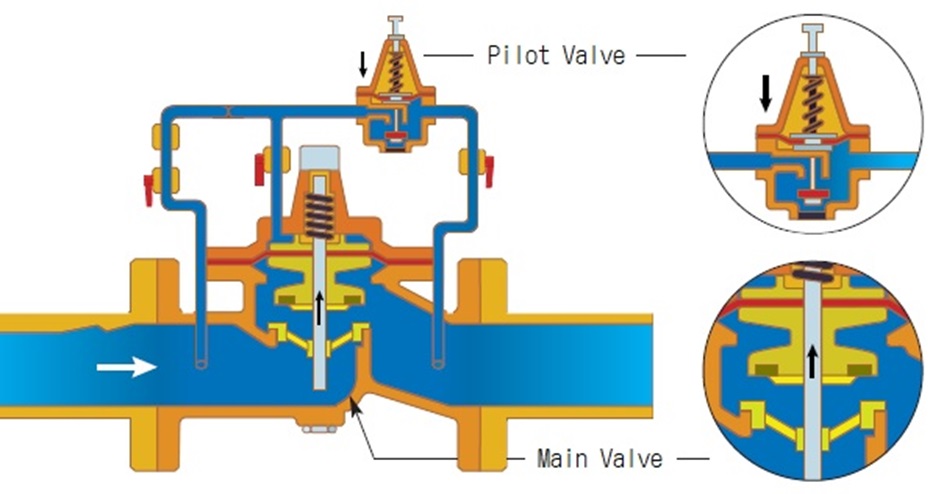
a.動作原理
-
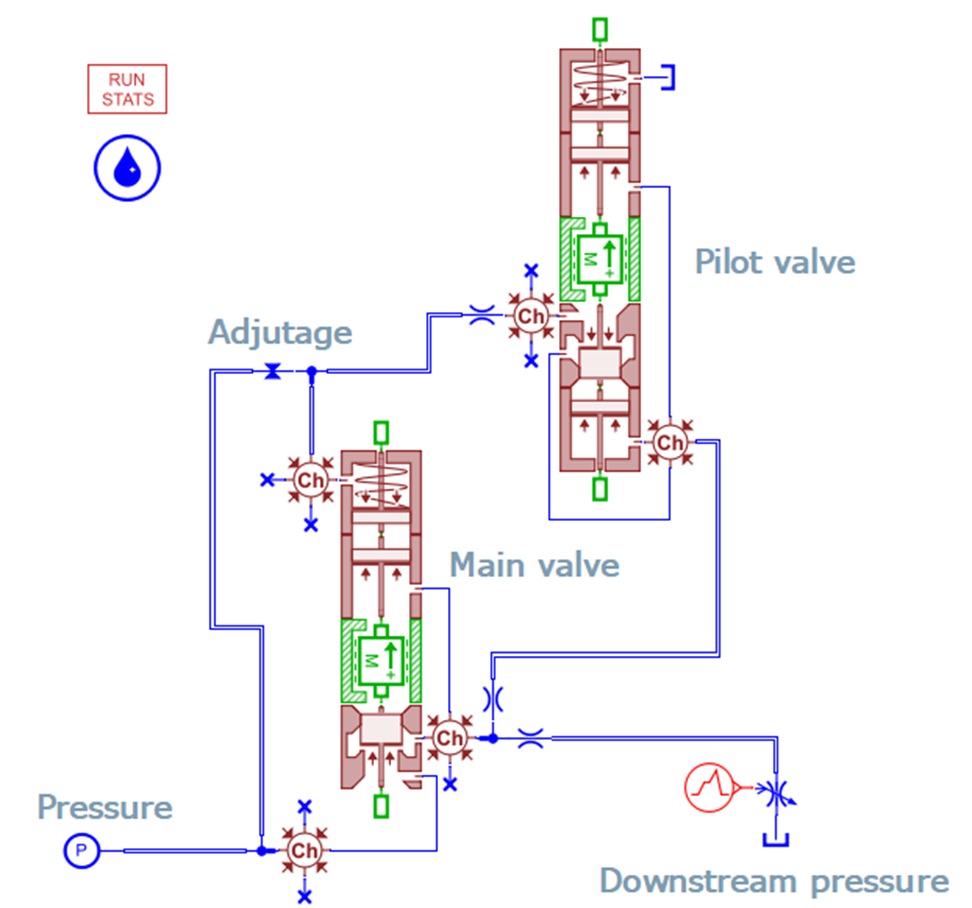
b. Amesimによるモデルのスケッチ
図2. 調圧弁の動作原理とモデル構成スケッチ(出典:Watts-Socla France)
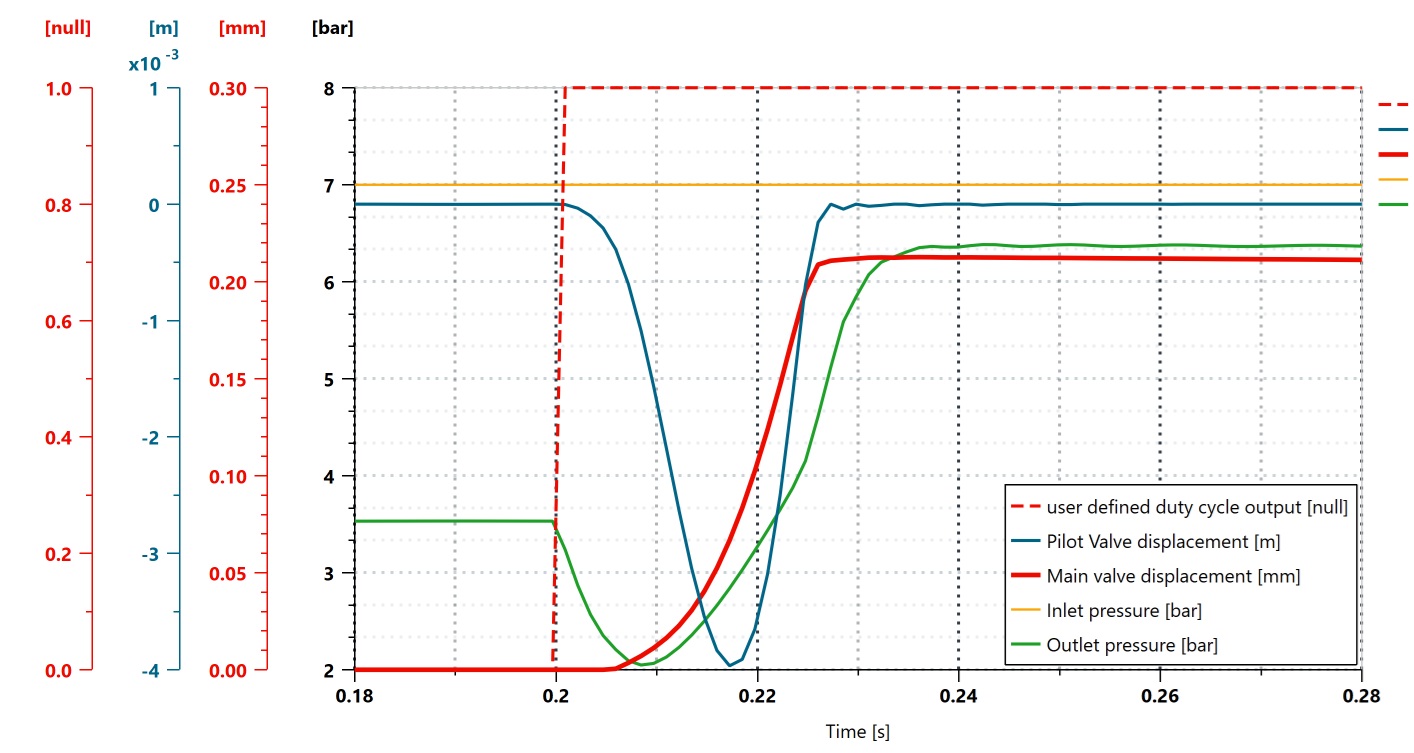
図3. 調圧弁動作シミュレーションの結果
シミュレーションは、開始時間から0.2s目に、下流の圧力を低下させて、パイロット弁、メイン弁と流路圧力を評価します。解析結果の一部を図3に示します。パイロット弁 (青)は、0.2sから動作し、0.217sで最大開放し、0.227sに閉じました。メイン弁 (赤)は、0.205sから開放し、約0.23sまでに開度が0.21mmに安定して、開放しました。排出圧(緑)は、0.236sまでに6.35 barの安定な供給が確保されることを確認できました。
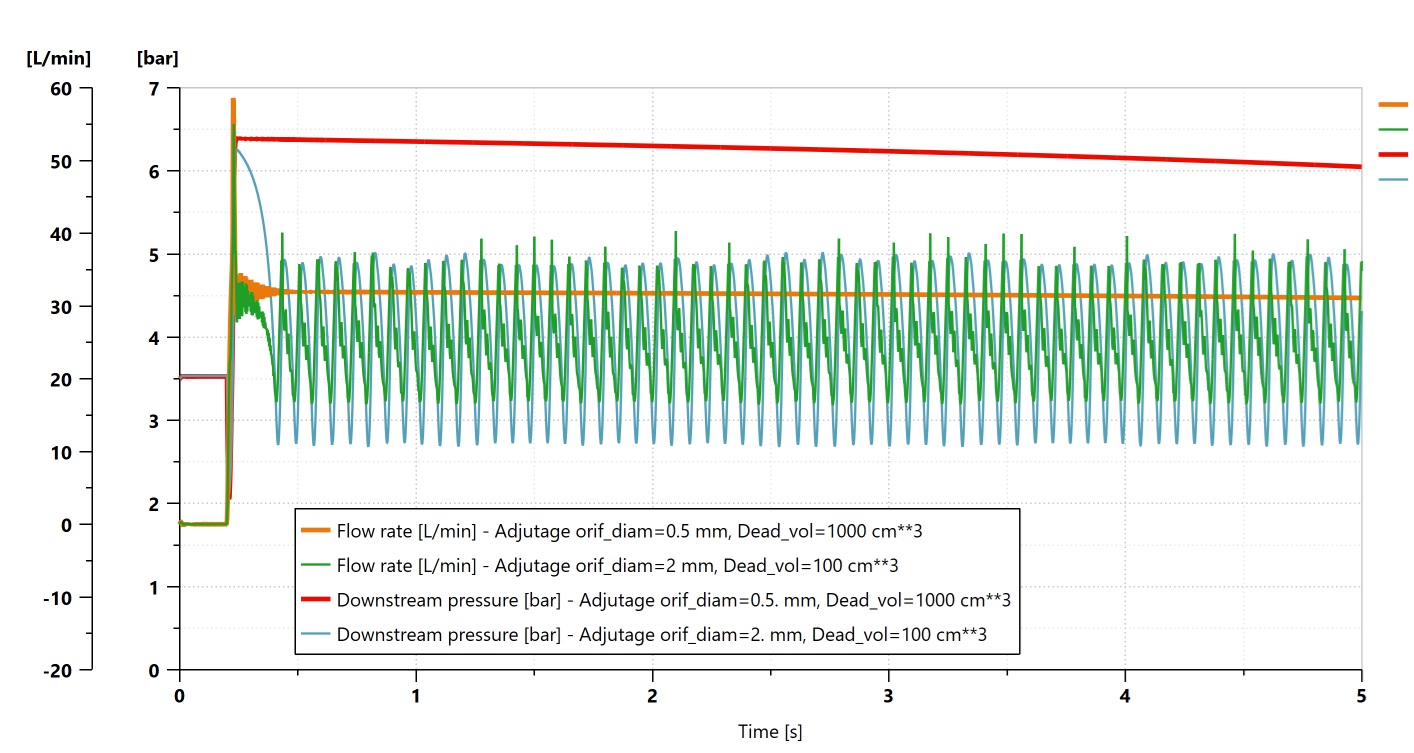
(a) Adjutageオリフィス直径0.5mmと2.0mm、デッドボリューム1000cm^3と100cm^3時の出力圧力・流量の比較
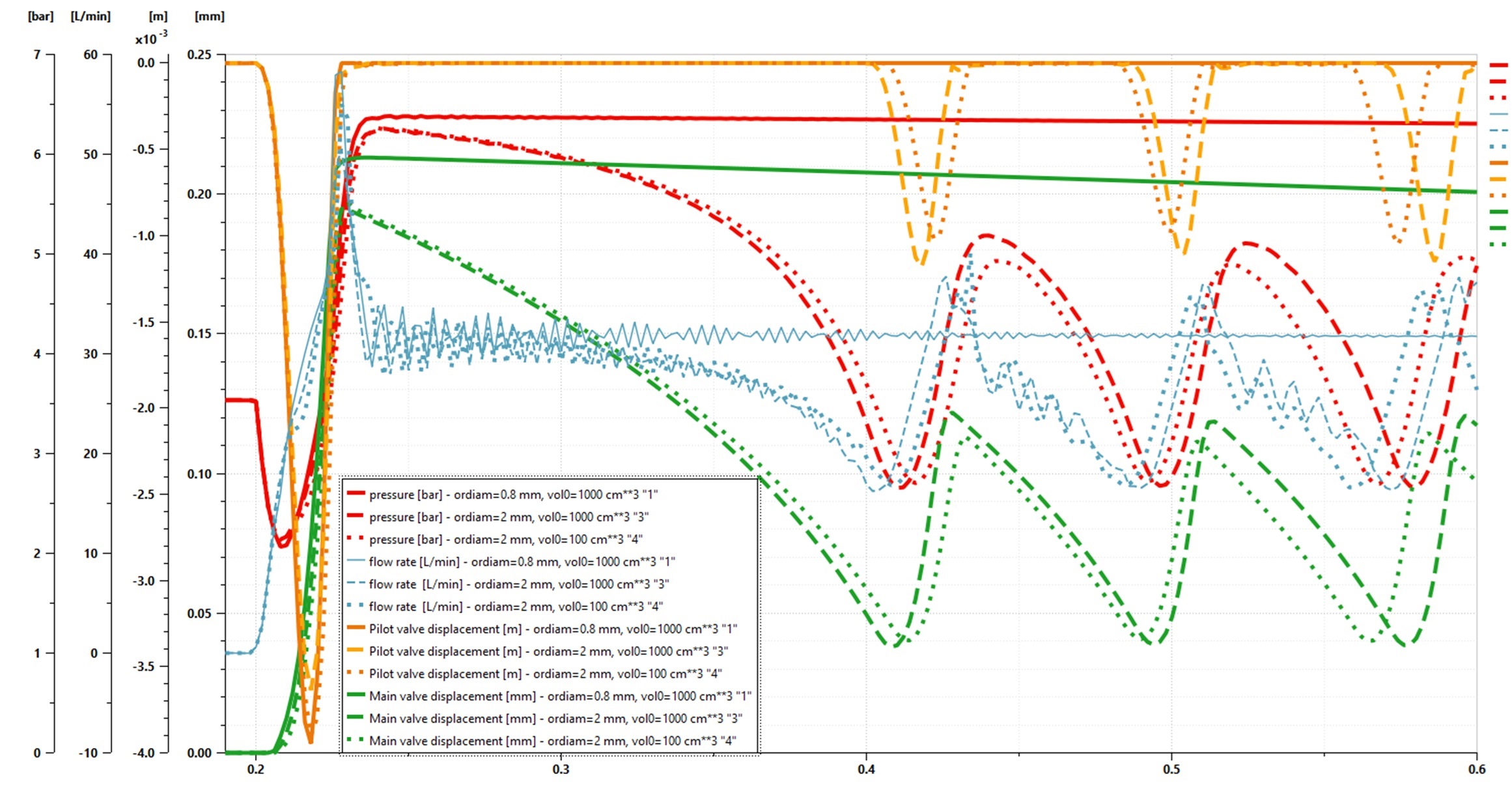
(b) Adjutageオリフィス直径0.8mmと2.0mm、デッドボリューム1000cm^3と100cm^3時のバルブ動作・出力圧力・流量の比較
図4. 調圧弁動作パラメータ スタディの解析結果比較の例
この調圧弁の設計スペックは、Adjutageオリフィス直径:0.5mm、デッドボリューム:1000cm^3です。ここで、パラメータスタディ変数としてAdjutageオリフィス直径を0.8mmと2.mmに、デッドボリュームを1000..cm^3と100.cm^3にそれぞれ設定し、解析を実施し、その影響を考えます。解析結果の一部を図4に示します。図4aは、標準寸法のAdjutageオリフィス直径0.5mm、デッドボリューム1000cm^3の場合と、Adjutageオリフィス直径2.0mm、デッドボリューム100cm^3の圧力と流量の解析結果の安定性を比較します。また、図4bは、排出流量(青)、圧力(赤)、パイロット弁及びメイン弁の移動量(オレンジ、緑)の時間推移を示します。Adjutageオリフィス直径を2.mmに変わると、下流に不安定な流路振動を引き起こしました。また、デッド ボリュームの減少により、振動周期が小さくなる傾向が見られます。これによって、適正なオリフィス寸法は、バルブの圧力調整機能が維持されることを確認できます。また、バルブの利用環境などいろいろなシナリオを想定してシミュレーションすれば、振動発生リスクを予測することができます。
4脚走行ロボットの走行制御システムの開発設計
4本の脚を持つ多関節ロボットを作成する方法と走行制御を考えます。
4本の脚は本体の両側に配置されます。各脚は、ピボットジャンクションで接続された2 つのセグメントに基づいています。動作は、サーボ弁で制御される油圧アクチュエータによって実行されます。
中央のボディ本体は、単体3次元メカニカル剛体で表し、4辺形プレートの形をしています。本体はZ軸を高さとし、Y軸が縦軸、X軸は横軸に対応しています。本体の両側に、脚と油圧ジャッキを連結するポートがあります。本体の接続ポートは同じ高さ(z軸)レベルにあり、脚と油圧ジャッキは下向きに取付けられ、重心はポート位置より低い位置にあり、全体的な安定性が向上されます。
脚は 2 つの関節部分で構成され、ピボット接合部で接続されています。各ピボット関節は油圧ジャッキによって構成され、要素の角度と位置を決定します。ジャッキは、制御コマンドをジャッキの有効位置と比較することによって所定の位置に操縦されます。
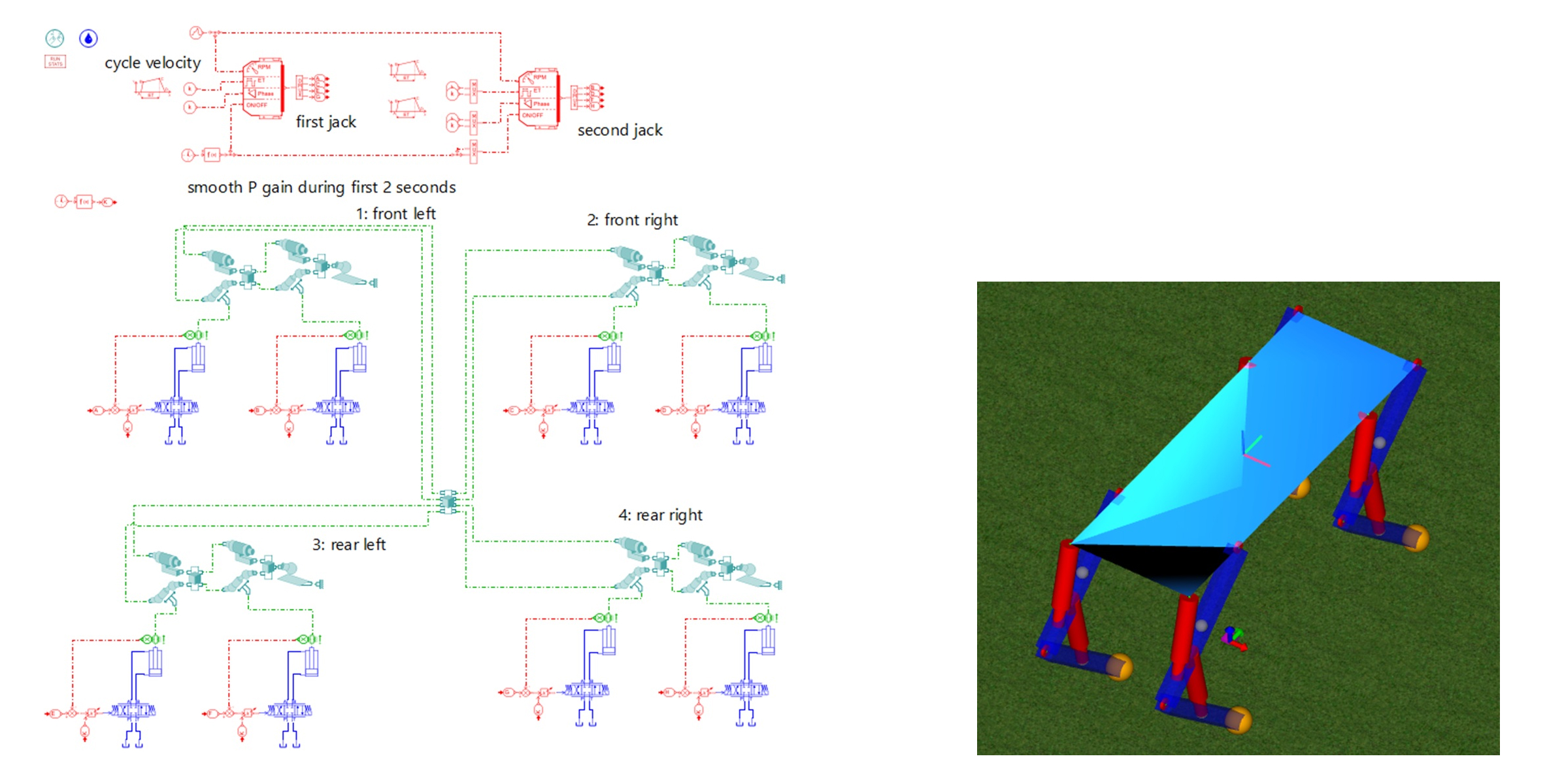
図5. 油圧式4脚走行ロボットの構成モデリング
各脚の先端は球体で、無限平面(地面)と接触します。地面は、視覚効果を向上させるために、草のテクスチャを持つ特別な平面で、モデリングされます。
走行は、各ジャッキの長さを制御する制御ループに基づいて、信号ジェネレータのサブモデルを使用し、4脚歩行が可能になります。制御は 3 本の脚を地面に接触させ、本体を安定させるために全体の高さを地形に合わせて一定の値に保つようにします。4 本目の脚は地面から離れて前に移動します。


図6. 各関節に転送された制御信号とピストン位置
制御信号はそれぞれ、前左脚と後右脚、前右脚と後左脚の第一関節と第二関節のサーボ制御弁に送られます。図6に制御信号および前左脚のピストン位置と制御信号の時刻歴を示します。走行と姿勢の動画表示を図7に示します。動画はMeca3Dアシストによって、モデルに組み込んだ3次元機械ライブラリのサブモデルの動作に対応します。
図7 ロボット走行の動画表示
航空機タキシングのシミュレーション
航空機が地上タキシングするときの安定性を評価します。エンジン、空気力、機体のモデル化にはSimcenter Amesimの航空・マリンライブラリの専用コンポーネントを使用し、着陸装置とステアリングは車両ダイナミクスライブラリの専用コンポーネントを使用します。
解析モデルのスケッチを図8に示します。次の5つカテゴリ要素で構成されています。
| 機体 (6DOF body) |
定数の質量と慣性を持つ線形化された6自由度剛体ボディで、飛行機が地面で走行するときの専用コンポーネント(ATBFD6DOFA01A)を利用しています。 |
|---|---|
| エンジン (Engines) |
航空機の重心にかかる力を計算するためのガスタービンの機能モデルで、6自由度の飛行力学シミュレーション用ガスタービンのコンポーネント(ATBFD6DOFTHR0000)を利用しています。本モデルでは、2つのエンジンを機体の左右に配置して、航空機の重心にかかる力/トルクを計算します。 |
| 空力効果機能モデル (Flight control surface) |
機体に適用される全体的な空力の力を計算する機能モデルです。空力係数は線形化されており、操縦翼面の動きによって発生する力を考慮できます。 |
| センサー (Sensors) |
航空機の姿勢と速度を追跡し、制御ループの実装に使用します。 |
| 地面反応モデル (Landing gear) |
着陸装置の挙動を表します。着陸装置は3車輪のスーバーコンポーネントで表されます。 |
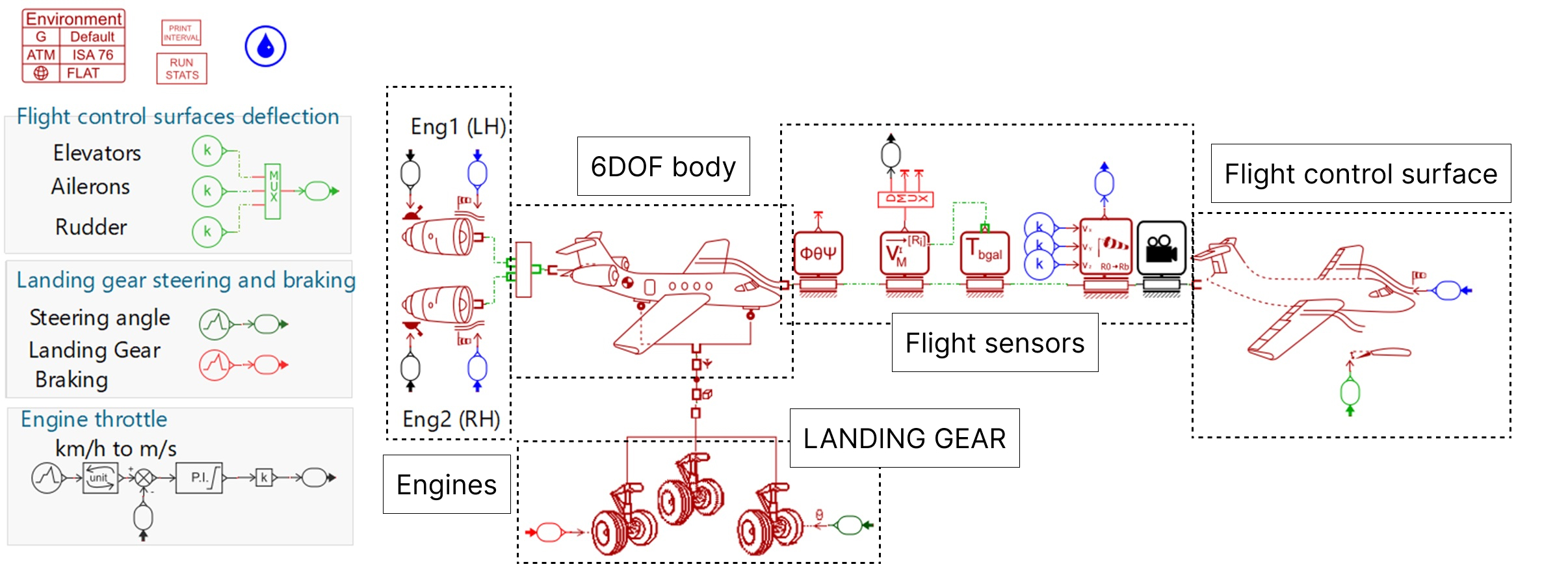
図8 航空機タキシング解析モデルのスケッチ図
この事例では地上での航空機のダイナミクスを検討するために、着陸装置が主要な役割を果たします。図8の下部に示す3車輪のスーバーコンポーネント着陸装置は、車両ダイナミックスライブラリのコンポーネントを使用してモデル化されました。
そのスケッチ図を図9に示します:
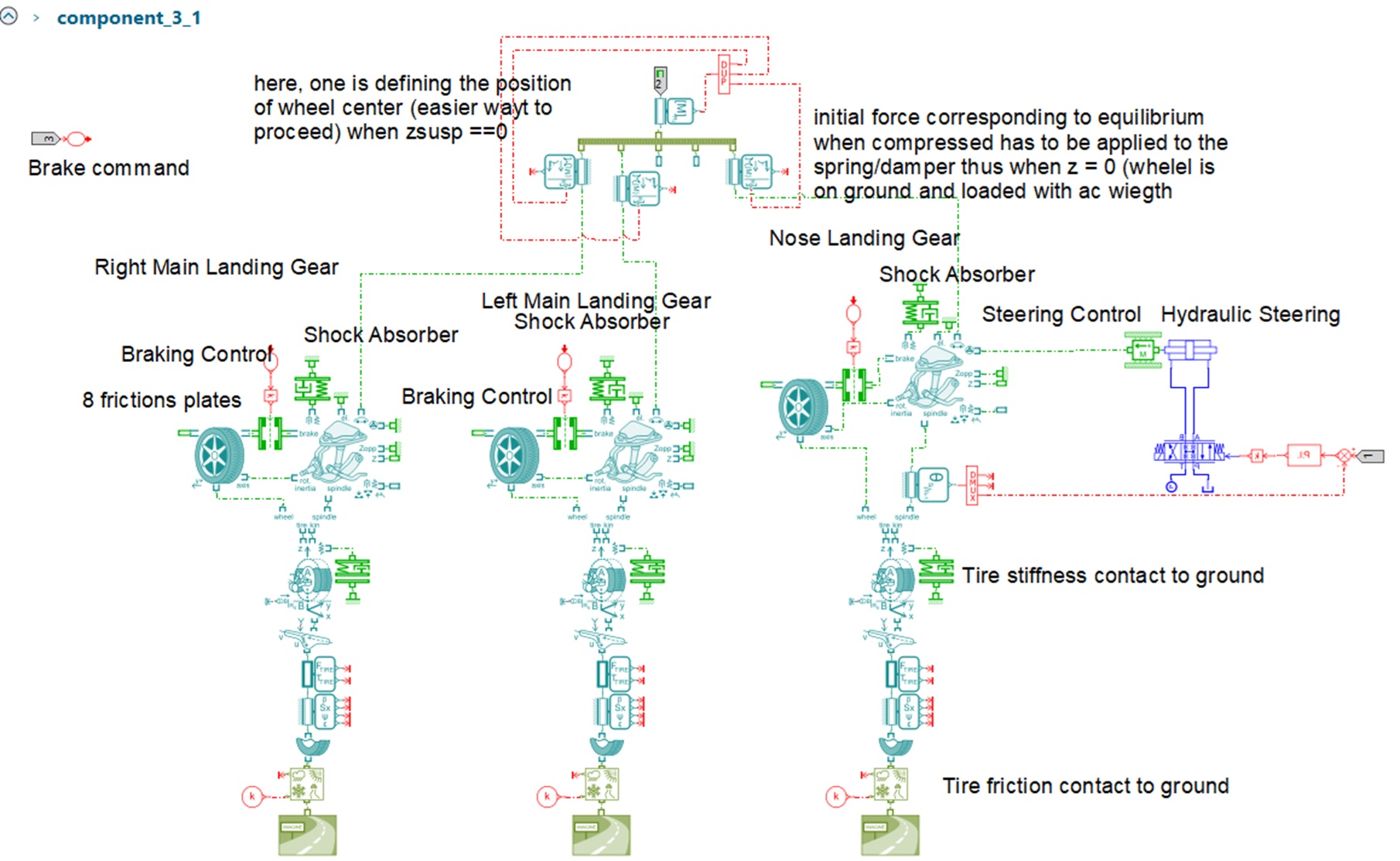
図9 着陸装置スーバーコンポーネント(LANDING GEAR)のスケッチ図
このシミュレーションで実行されるシナリオは、ランプから滑走路との交差点までの航空機のタキシングを再現し、そこで航空機は待機位置に入ります
航空機は地上で停止しており、推力が生成されて移動し、速度を 25 ノット未満に維持します。
その次に、ステアリング操作コマンドが適用され、航空機が誘導路に入ります。
ブレーキ操作コマンドが適用され、航空機が減速し、滑走路との交差点で停止します。
シミュレーションの結果を、図10に示します。上図(図10a)は、ステアリング(青)とブレーキ(オレンジ)操作コマンドに対する機体の応答加速度(赤)を示します。下図(図10b)はステアリング操作によって航空機のピッチ(青)、ヨー(オレンジ)とロール(赤)の応答にどのような影響を与えるかを示しています。ブレーキ操作の影響を受け、航空機は減速し、停止のためのブレーキ操作でピッチ応答振動が見られますが、その後、振動はほとんど確認されません。

a)ステアリングとブレーキ操作コマンドと機体の加速度応答

b)ステアリングとブレーキ操作による機体のヨー・ロール・ピッチ応答
図10 解析結果の機体運動のプロット表示
電動ウィンチの電力消費とパフォーマンス評価
電動ウィンチを使用して荷物を持ち上げるときのパフォーマンスと電力消費を評価します。本事例の電動ウィンチは、図11に示すように、給電プラグ(G、三相110-190V, 60Hz電源)、電気制御システム(E)、DCモーター(M)、ギアボックス(Gr)、ドラム(D)、ブレーキ(B)、リモコン(R)、荷物台座(S)、荷物(m、450kgf)で構成されます。解析モデルのスケッチ図を図12に示します。
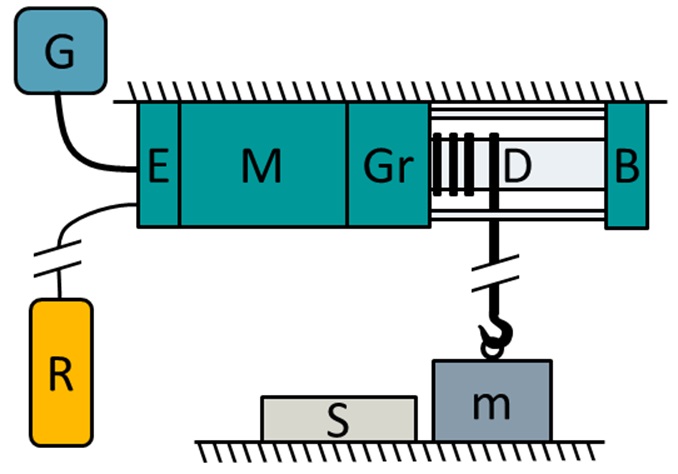
図11 電動ウィンチのモデル構成
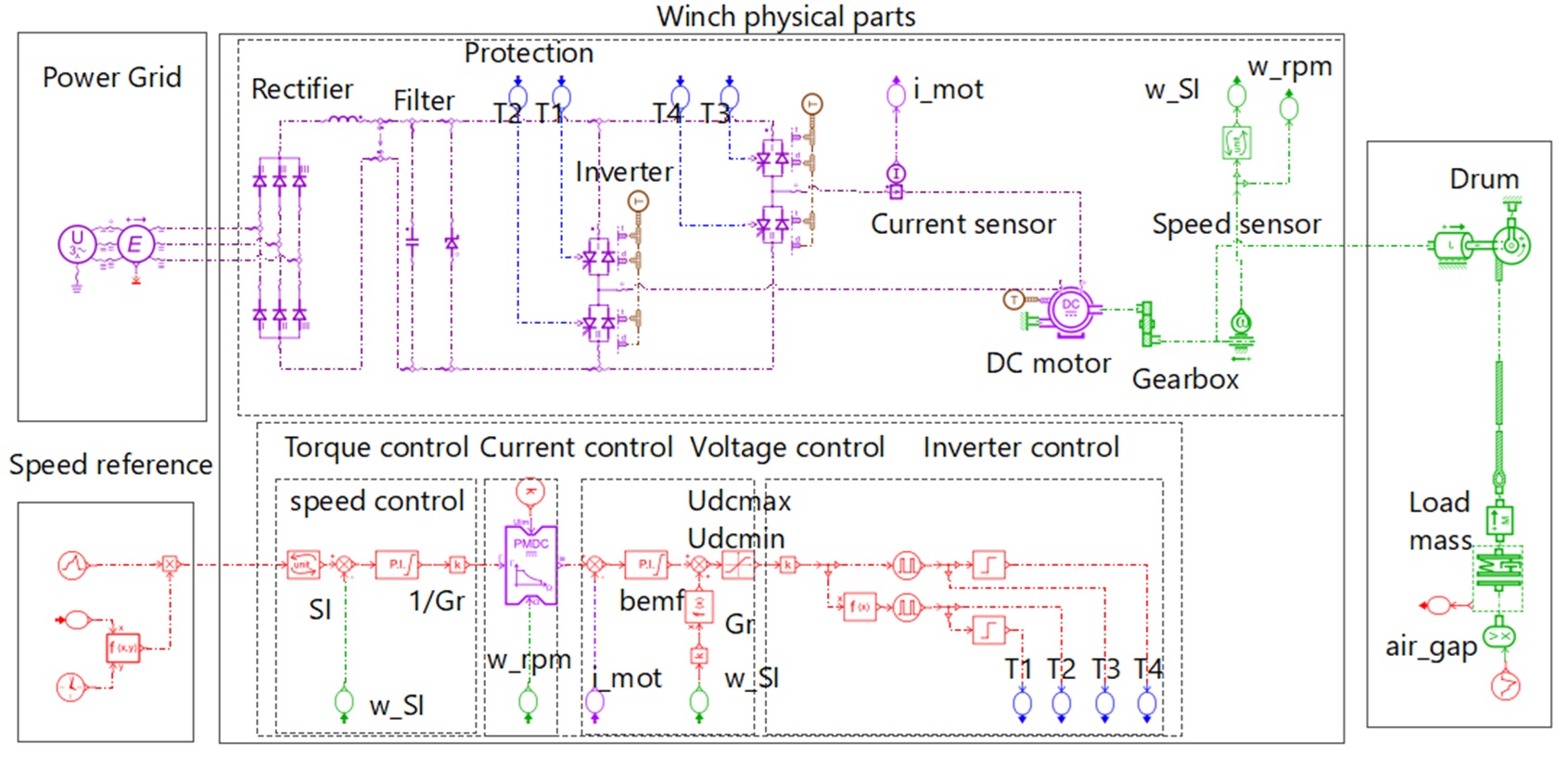
図12 解析モデルスケッチ
簡素化のため、シミュレーションは以下のステップを想定し、1.8秒間で荷物を上下方向に移動します:
- 1秒間で、450kgの荷物を地面から4cm持ち上げます。
- 荷物下方の、地面から高さ2cmの荷台Sに置きます。
- 約0.8秒間で荷物を荷台に降ろしていきます。
トルク制御にはPIコントローラが使用され、比例ゲインKと積分ゲインKiは、主に減衰率 dzeta と立ち上がり時間 tau_dの2つのグローバルパラメータに基づいて計算されます。デフォルト設定値は、dzeta=1、tau_d=0.02秒です。減衰率 dzeta が性能とエネルギー消費に与える影響を調べるために、異なる減衰率 dzeta =1とdzeta=2.5をパラメータスタディの変数として設定し、シミュレーションを実行しました。貨物の上下移動速度と消費エネルギー量を評価します。
シミュレーションの結果の一部を図13と図14に示します。減衰率dzetaを1から2.5に増やすと、荷物の移動速度はほぼ変わりませんが、低速応答によってエネルギー消費が約14%削減されることが確認できました。

図13 左:速度制御コマンド(青)とモータ回転速度(赤)、右:荷物上下移動量(m)と荷物上下移動速度(m/s)

図14 パラメータスタディ:減衰率dzeta=1.とdzeta=2.5での解析結果比較 (左:荷物上下移動速度(m/s) 右:消費エネルギー量(J))
Simcenter Amesim 利用環境
| OS プリポスト・ソルバー一体 |
・Windows 10 (64bit) ・Windows 11 (64bit) |
|---|
Simcenter Amesim 製品構成
製品
|
オプション
|
ライセンス形態
| 買い取り | 永久ライセンス。別途、年間保守加入によりサポートとソフトウェア更新が含まれます。 |
|---|---|
| 年間レンタルXaaS | 1年間または3年間レンタル期間ライセンス、期間内にサポートとソフトウェア更新を含みます。 |